
به گزارش بازار، کنترل سیستمها یکی از حوزههای اساسی در علوم مهندسی است که تأثیر گستردهای بر تکنولوژیهای پیشرفته و زندگی روزمره ما داشته است. از خودروهای خودران گرفته تا مدیریت شبکههای قدرت، سیستمهای کنترل نقش کلیدی در بهینهسازی عملکرد و افزایش کارایی دارند. علم کنترل یکی از ارکان اساسی مهندسی است که به توسعه سیستمهای خودکار و هوشمند در حوزههای مختلف از رباتیک گرفته تا مدیریت انرژی کمک میکند. تاریخچه کنترل به اختراع دستگاههای ابتدایی مانند تنظیمکننده بخار بازمیگردد، اما پیشرفتهای چشمگیر در رایانهها و فناوری باعث شد تا کنترل پیچیدهتری ارائه شود. این مطلب به بررسی جامع اصول، روشها، و کاربردهای سیستمهای کنترل میپردازد. همچنین، موضوعاتی مانند انجام پروژه کنترل پیشبین، کنترل یادگیری تقویتی، کنترل سیستمهای قدرت، و شناسایی سیستم مورد بحث قرار میگیرند.

بخش اول: اصول پایه کنترل
سیستمهای کنترل به طور گسترده در بسیاری از صنایع استفاده میشوند. این بخش مروری بر اصول پایهای شامل موارد زیر خواهد داشت:
-
سیستم حلقه باز: در این نوع سیستم، خروجی بر کنترلکننده تأثیری ندارد؛ مانند ماشین لباسشویی.
-
سیستم حلقه بسته: خروجی مستقیماً به ورودی بازخورد داده میشود؛ مانند کنترل سرعت خودرو.
-
پایداری: شرط اساسی برای عملکرد مناسب هر سیستم کنترلی.
کاربردهای پایهای
-
تنظیم سرعت موتورها در صنعت.
-
کنترل دما در سیستمهای تهویه مطبوع.
-
مدیریت حرکت بازوهای رباتیک در تولید.
برای درک بهتر این مفاهیم، انجام پروژه کنترل با متلب میتواند به شبیهسازی و تحلیل رفتار این سیستمها کمک کند.
بخش دوم: کنترل پیشبین و کاربردهای آن
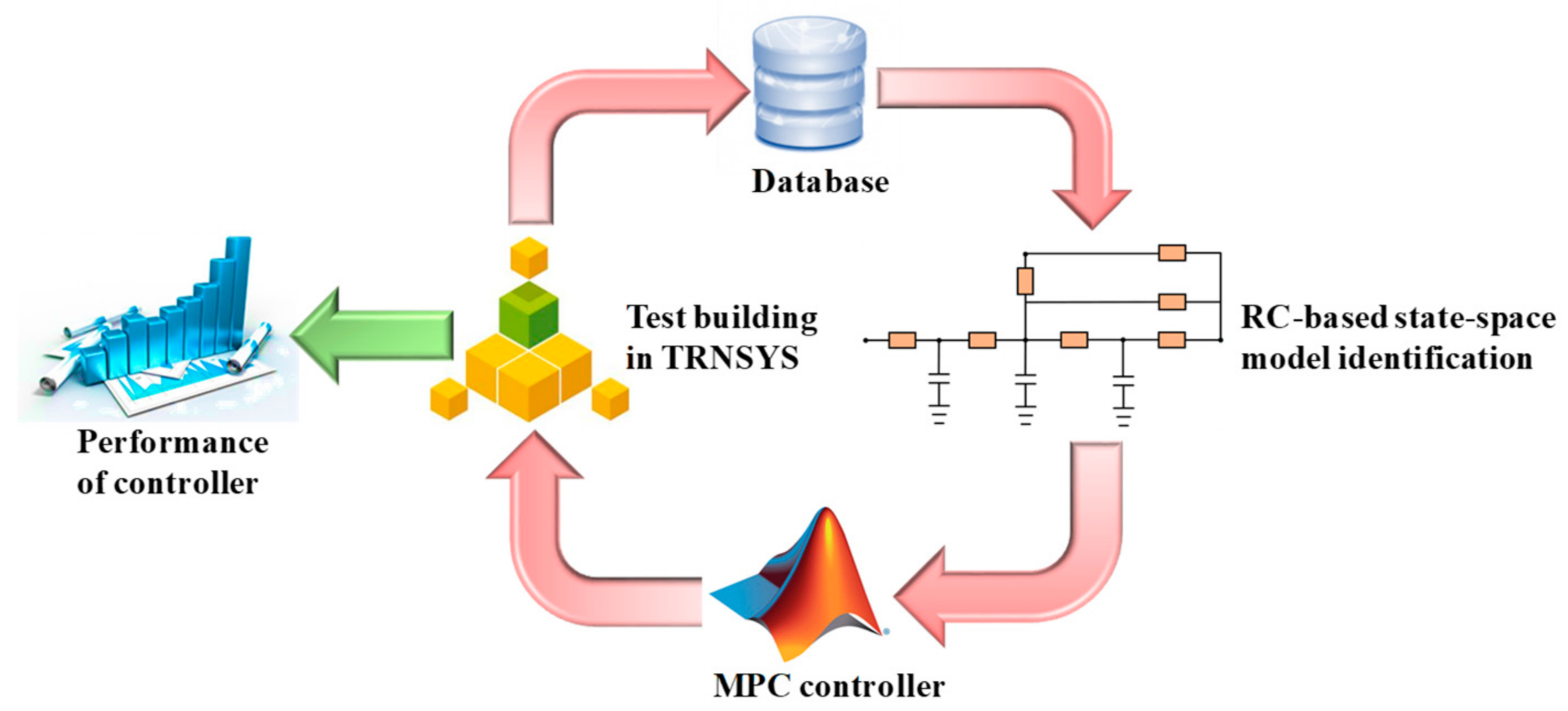
کنترل پیشبین مدل (MPC) یکی از روشهای قدرتمند در کنترل سیستمهای پویا است که بر پایه پیشبینی رفتار آینده سیستم و بهینهسازی عملکرد آن طراحی میشود. این روش در صنایعی مانند فرآیندهای شیمیایی، خودروسازی، هوافضا، و حتی در سیستمهای مدیریت انرژی به کار گرفته میشود. در این مقاله، به بررسی اصول، مزایا، چالشها و کاربردهای کنترل پیشبین میپردازیم.
اصول کنترل پیشبین مدل
کنترل پیشبین مدل بر مبنای یک مدل ریاضی از سیستم طراحی میشود و مراحل اصلی آن عبارتند از:
-
پیشبینی رفتار آینده سیستم: با استفاده از مدل سیستم و دادههای کنونی، رفتار آینده سیستم برای یک افق زمانی مشخص پیشبینی میشود.
-
بهینهسازی تابع هزینه: بر اساس پیشبینی انجامشده، تابع هزینهای تعریف میشود که شامل خطای ردیابی و مصرف انرژی یا تلاش کنترلی است. سپس با روشهای بهینهسازی این تابع حداقل میشود.
-
اجرای اولین ورودی کنترلی: از دنباله ورودیهای کنترلی بهینه، تنها اولین مقدار اعمال شده و سپس فرآیند از ابتدا برای زمان بعدی تکرار میشود.
مدلسازی سیستم در MPC
یک مدل دقیق از سیستم برای عملکرد بهینه کنترل پیشبین ضروری است. انواع مدلهای مورد استفاده عبارتند از:
-
مدلهای خطی: پرکاربردترین نوع مدل در MPC است که شامل مدلهای فضای حالت، مدلهای ARX و ARMAX است.
-
مدلهای غیرخطی: برای سیستمهای پیچیدهتر به کار میروند و معمولاً با روشهایی مانند شبکههای عصبی، مدلهای فازی یا تقریب خطی در نقاط کاری مختلف پیادهسازی میشوند.
-
مدلهای ترکیبی: در برخی موارد، ترکیبی از مدلهای خطی و غیرخطی برای دستیابی به دقت بیشتر استفاده میشود.
مزایای کنترل پیشبین
کنترل پیشبین مدل به دلیل ویژگیهای منحصربهفرد خود در بسیاری از کاربردها بر روشهای کنترلی کلاسیک ارجحیت دارد:
-
مدیریت محدودیتها: MPC میتواند بهصورت مستقیم محدودیتهای فیزیکی سیستم، مانند محدودیتهای ورودی و خروجی را در نظر بگیرد.
-
پیشبینی رفتار آینده: این کنترلر با بهرهگیری از مدل، قادر به پیشبینی رفتار سیستم و انجام اقدامات مناسب برای جلوگیری از خطاهای بزرگ است.
-
انعطافپذیری: به دلیل مدلمحور بودن، میتواند برای سیستمهای مختلف به کار رود.
-
بهینهسازی عملکرد: با بهینهسازی تابع هزینه، میتوان عملکرد مطلوبی را نسبت به روشهای سنتی به دست آورد.
چالشهای کنترل پیشبین
با وجود مزایای متعدد، MPC دارای چالشهایی نیز هست که میتوان به موارد زیر اشاره کرد:
-
پیچیدگی محاسباتی: حل مسائل بهینهسازی بهصورت بلادرنگ در هر مرحله نیازمند قدرت محاسباتی بالاست.
-
وابستگی به مدل: دقت کنترل پیشبین بستگی زیادی به صحت مدل مورد استفاده دارد و عدم تطابق مدل میتواند موجب کاهش عملکرد شود.
-
نیاز به دادههای زیاد: برای مدلسازی و بهینهسازی نیاز به دادههای کافی از سیستم وجود دارد.
همچنین، انجام پروژه کنترل پیشبین با متلب امکان پیادهسازی عملی این روش را فراهم میکند
روشهای حل در MPC
چندین روش برای حل مسائل MPC وجود دارد که برخی از مهمترین آنها عبارتند از:
-
روشهای مبتنی بر برنامهریزی خطی (LP): در صورتی که مدل و تابع هزینه خطی باشند، میتوان از الگوریتمهای بهینهسازی خطی استفاده کرد.
-
روشهای مبتنی بر برنامهریزی درجه دوم (QP): در مسائل دارای قیود درجه دوم، روشهای برنامهریزی درجه دوم به کار گرفته میشوند.
-
روشهای غیرخطی (NLP): برای مدلهای غیرخطی، از روشهایی مانند الگوریتمهای گرادیان کاهشی و بهینهسازی مبتنی بر قیود استفاده میشود.
-
بهینهسازی مبتنی بر هوش مصنوعی: در برخی از کاربردها، روشهایی مانند الگوریتم ژنتیک، شبکههای عصبی و الگوریتمهای تکاملی برای حل بهینهسازی به کار میروند.
کاربردهای کنترل پیشبین
کنترل پیشبین در طیف وسیعی از صنایع کاربرد دارد. برخی از مهمترین حوزههای کاربردی عبارتند از:
۱. کنترل فرآیندهای صنعتی
MPC در صنایعی مانند نفت، گاز، پتروشیمی، و صنایع شیمیایی برای کنترل دما، فشار و جریان به کار گرفته میشود.
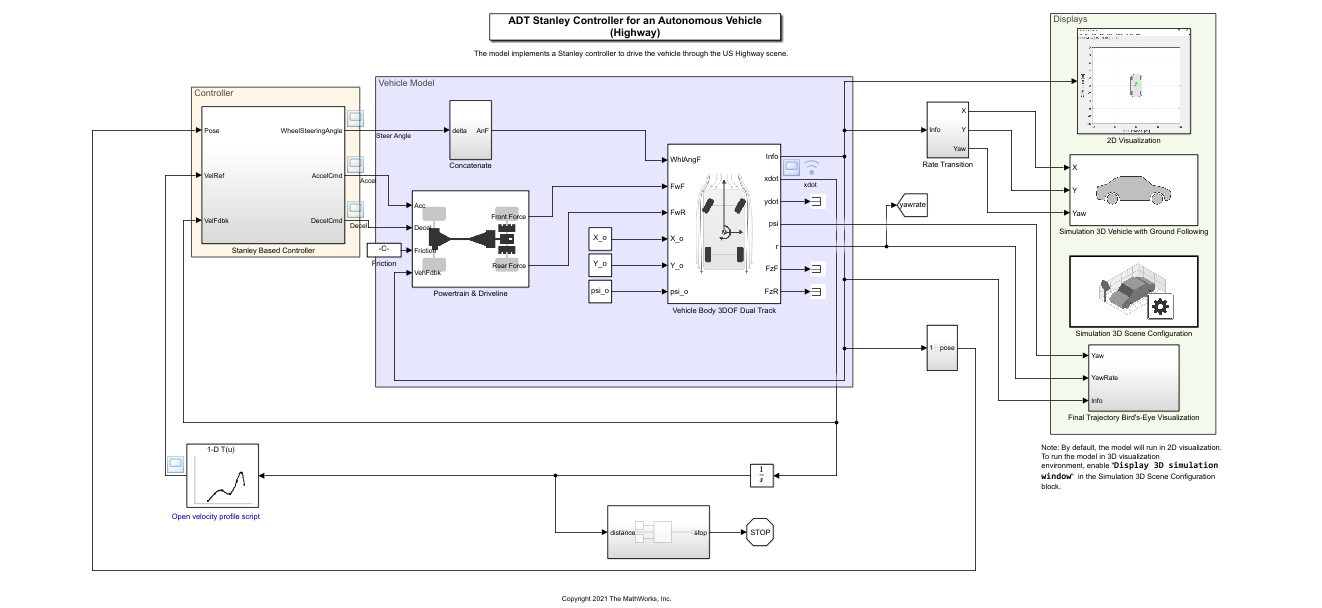
۲. خودروسازی و حملونقل
در سیستمهای کنترل پیشرفته خودرو، مانند کنترل کروز تطبیقی (ACC) و مدیریت مصرف سوخت، MPC نقش مهمی دارد.
۳. هوافضا و رباتیک
در کنترل مسیر پرواز، تنظیم موقعیت پهپادها و کنترل رباتهای متحرک از MPC استفاده میشود.
۴. مدیریت انرژی و شبکههای قدرت
کنترل پیشبین در بهینهسازی مصرف انرژی در ساختمانها، مدیریت بار شبکههای برق و کنترل تولید منابع انرژی تجدیدپذیر کاربرد دارد.
۵. پزشکی و بیومکانیک
در کنترل دستگاههای پزشکی مانند پمپهای انسولین هوشمند و کنترل پروتزهای هوشمند از MPC استفاده میشود.
آینده کنترل پیشبین
با پیشرفت تکنولوژی و افزایش توان محاسباتی، انتظار میرود که کنترل پیشبین مدل در سالهای آینده بیش از پیش در سیستمهای پیچیده و زمانحقیقی مورد استفاده قرار گیرد. ترکیب MPC با یادگیری ماشین و هوش مصنوعی میتواند قابلیتهای جدیدی برای پیشبینی و کنترل ارائه دهد.
بخش سوم: کنترل یادگیری تقویتی
کنترل هوشمند یکی از شاخههای پیشرفته مهندسی کنترل است که با استفاده از تکنیکهای هوش مصنوعی، سیستمهای کنترلی را بهینهتر، سازگارتر و کارآمدتر میکند. یکی از روشهای مهم در این زمینه، یادگیری تقویتی (Reinforcement Learning) است که به سیستمهای کنترلی این امکان را میدهد که از طریق تعامل با محیط، یادگیری انجام دهند و عملکرد خود را بهبود بخشند.
کنترل هوشمند چیست؟
کنترل هوشمند به دستهای از روشهای کنترلی گفته میشود که از الگوریتمهای یادگیری ماشین، منطق فازی، شبکههای عصبی و سایر روشهای محاسباتی الهام گرفته از طبیعت برای تصمیمگیری و کنترل سیستمها استفاده میکنند. این روشها بهویژه در سیستمهایی که دارای عدم قطعیت، پویایی پیچیده و مدلسازی دشوار هستند، بسیار مفید هستند.
کنترل هوشمند میتواند شامل تکنیکهای مختلفی باشد، از جمله:
-
کنترل تطبیقی (Adaptive Control): سیستم کنترل با توجه به تغییرات محیط یا سیستم، پارامترهای خود را تنظیم میکند.
-
کنترل فازی (Fuzzy Control): استفاده از منطق فازی برای مدیریت سیستمهایی که مدلسازی دقیق آنها دشوار است.
-
کنترل مبتنی بر شبکههای عصبی (Neural Network Control): استفاده از شبکههای عصبی برای یادگیری و تخمین مدلهای پیچیده سیستم.
-
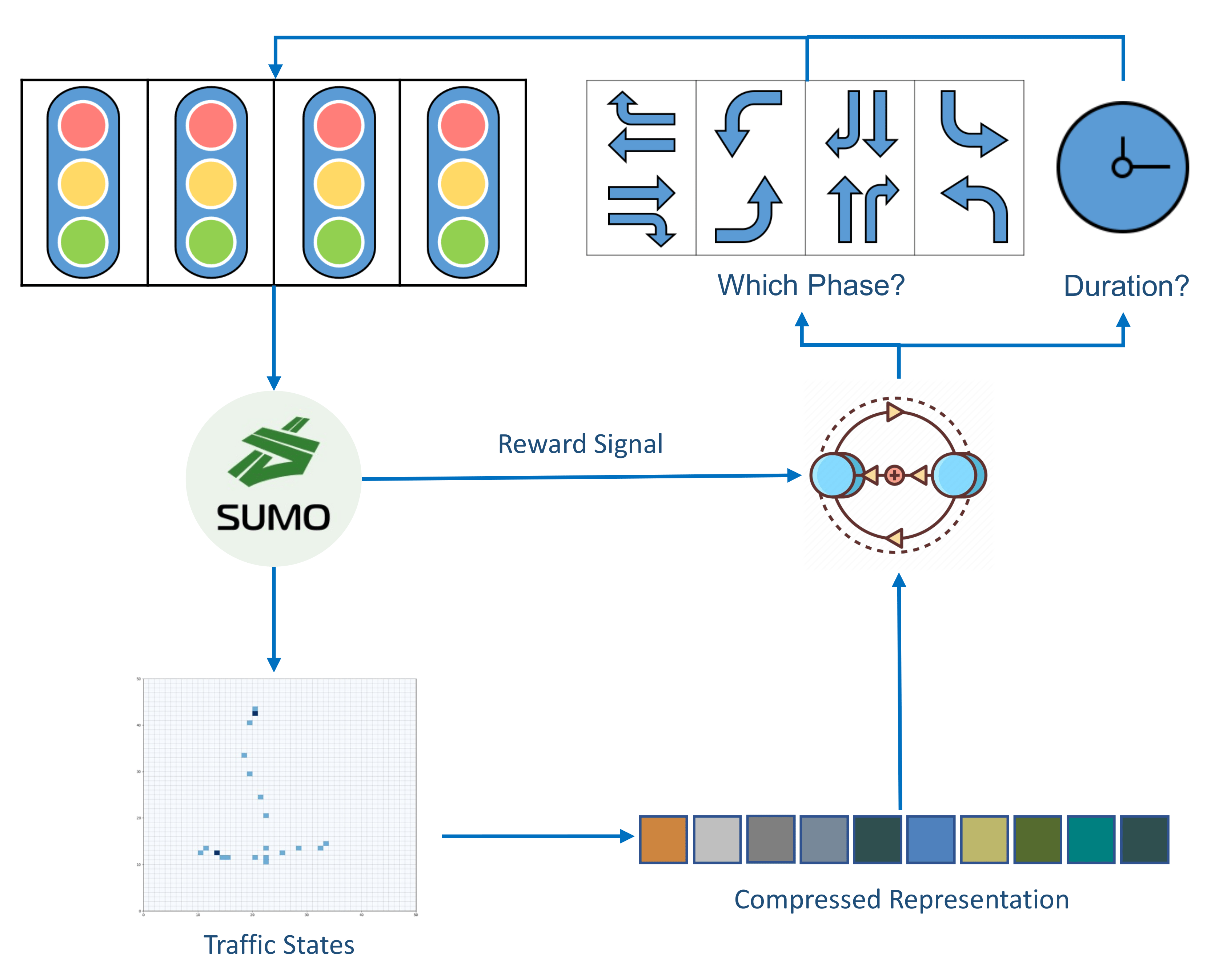
یادگیری تقویتی (Reinforcement Learning): یادگیری از طریق تعامل با محیط و بهینهسازی سیاست کنترلی بر اساس پاداشها.
یادگیری تقویتی چیست؟
یادگیری تقویتی یکی از زیرشاخههای یادگیری ماشین است که در آن یک عامل (Agent) با انجام اقدامات مختلف در محیط، سعی میکند حداکثر پاداش ممکن را به دست آورد. این روش بهطور خاص برای حل مسائل کنترلی مناسب است، زیرا در بسیاری از مسائل کنترل، مدل دقیقی از سیستم در دسترس نیست یا سیستم دارای عدم قطعیت بالایی است.
اجزای اصلی یادگیری تقویتی
یادگیری تقویتی از چندین مؤلفه کلیدی تشکیل شده است:
-
عامل (Agent): موجودی که در محیط عمل کرده و یادگیری انجام میدهد.
-
محیط (Environment): فضایی که عامل در آن فعالیت میکند و تغییرات را تجربه میکند.
-
حالت (State): توصیف وضعیت کنونی محیط.
-
عمل (Action): اقداماتی که عامل میتواند در محیط انجام دهد.
-
پاداش (Reward): فیدبک عددی که عامل بر اساس عملکرد خود دریافت میکند.
-
سیاست (Policy): استراتژیای که عامل برای انتخاب عمل در هر وضعیت استفاده میکند.
-
تابع ارزش (Value Function): ارزیابی بلندمدت از مقدار پاداشی که از یک حالت خاص انتظار میرود.
الگوریتمهای یادگیری تقویتی
در یادگیری تقویتی، الگوریتمهای مختلفی برای یادگیری سیاستهای بهینه وجود دارد که برخی از مهمترین آنها عبارتند از:
-
Q-Learning: یک روش یادگیری خارج از سیاست (Off-policy) که از جداول Q برای ذخیره مقادیر حالت-عمل استفاده میکند.
-
SARSA: یک روش یادگیری درون سیاست (On-policy) که در آن سیاست یادگیری و سیاست اجرایی یکسان هستند.
-
Deep Q-Network (DQN): ترکیب یادگیری Q با شبکههای عصبی عمیق برای حل مسائل با فضای حالت بزرگ.
-
Policy Gradient: یک روش مبتنی بر گرادیان که مستقیماً سیاست بهینه را یاد میگیرد.
-
Actor-Critic: ترکیب روشهای مبتنی بر ارزش و مبتنی بر سیاست برای بهبود کارایی یادگیری.
کاربردهای یادگیری تقویتی در کنترل هوشمند
یادگیری تقویتی در بسیاری از مسائل کنترلی پیچیده به کار گرفته شده است. برخی از مهمترین کاربردهای آن عبارتند از:
۱. کنترل رباتیک
در حوزه رباتیک، یادگیری تقویتی به رباتها این امکان را میدهد که بدون نیاز به مدلسازی دقیق، رفتارهای پیچیده را یاد بگیرند. برای مثال:
-
یادگیری راه رفتن رباتهای دوپا و چهارپا.
-
بهینهسازی مسیر حرکت بازوهای رباتیک در محیطهای نامعین.
-
تعامل ربات با اشیاء و یادگیری کنترل گرفتن و جابهجایی آنها.
۲. کنترل فرایندهای صنعتی
در صنایعی مانند پالایشگاهها، نیروگاههای برق و کارخانههای تولیدی، یادگیری تقویتی برای بهینهسازی فرآیندها به کار گرفته میشود. برای مثال:
-
کنترل دمای کورههای صنعتی.
-
بهینهسازی مصرف انرژی در سیستمهای تهویه مطبوع.
۳. کنترل وسایل نقلیه خودران
یکی از مهمترین کاربردهای یادگیری تقویتی، کنترل وسایل نقلیه خودران است. یادگیری تقویتی میتواند به خودروهای خودران کمک کند تا در شرایط مختلف رانندگی، تصمیمات بهینه بگیرند. برای مثال:
-
یادگیری نحوه تغییر مسیر و سبقت گرفتن.
-
کنترل تطبیقی سرعت بر اساس شرایط جاده.
-
برنامهریزی مسیر بهینه برای کاهش مصرف سوخت.
۴. سیستمهای مدیریت انرژی
در حوزه انرژی، یادگیری تقویتی به بهینهسازی مصرف انرژی و کنترل شبکههای هوشمند کمک میکند. نمونههایی از این کاربردها عبارتند از:
-
بهینهسازی مصرف انرژی در ساختمانهای هوشمند.
-
کنترل توزیع توان در شبکههای هوشمند برق.
-
مدیریت بار در سیستمهای تولید انرژی تجدیدپذیر.
چالشها و محدودیتهای یادگیری تقویتی در کنترل
اگرچه یادگیری تقویتی ابزار قدرتمندی برای کنترل هوشمند است، اما چالشها و محدودیتهایی نیز دارد، از جمله:
-
نیاز به دادههای زیاد: یادگیری تقویتی معمولاً به تعداد زیادی تعامل با محیط نیاز دارد که در برخی از مسائل واقعی ممکن است هزینهبر یا غیرممکن باشد.
-
زمان یادگیری طولانی: بسیاری از الگوریتمهای یادگیری تقویتی زمان زیادی برای یادگیری یک سیاست مناسب نیاز دارند.
-
مشکلات همگرایی: در برخی موارد، عامل ممکن است به سیاستهای ناکارآمد یا بهینه محلی همگرا شود.
-
عدم قطعیت در محیط: محیطهای دنیای واقعی پیچیده و پویا هستند، که یادگیری تقویتی را دشوارتر میکند.
انجام پروژه یادگیری تقویتی با متلب میتواند بسیار موثر باشد.
بخش چهارم: کنترل در سیستمهای قدرت
کنترل در سیستمهای قدرت نقش اساسی در تضمین پایداری، امنیت و کارایی شبکههای برق ایفا میکند. سیستمهای قدرت شامل تولید، انتقال، توزیع و مصرف انرژی الکتریکی هستند که برای عملکرد بهینه نیازمند راهکارهای کنترلی پیشرفته میباشند.

۱. اهمیت کنترل در سیستمهای قدرت
سیستمهای قدرت با چالشهایی همچون تغییرات بار، نوسانات ولتاژ، ناپایداری فرکانس و وقوع خطاها مواجهاند. برای جلوگیری از خاموشیها و افزایش بهرهوری، روشهای کنترلی مختلفی به کار گرفته میشود. هدف اصلی کنترل در سیستمهای قدرت حفظ پایداری ولتاژ و فرکانس، کاهش تلفات انرژی و افزایش قابلیت اطمینان شبکه است.
۲. انواع روشهای کنترل در سیستمهای قدرت
کنترل در سیستمهای قدرت در سه سطح کلی انجام میشود:
-
کنترل اولیه (Primary Control)
- وظیفه اصلی آن تنظیم فوری فرکانس و توان خروجی ژنراتورها در پاسخ به تغییرات بار است.
- از سیستمهای کنترل سرعت (گاورنر) و تنظیمکنندههای خودکار ولتاژ (AVR) برای تنظیم خروجی ژنراتورها استفاده میشود.
-
کنترل ثانویه (Secondary Control)
- هدف آن بازگرداندن فرکانس و ولتاژ به مقدار نامی پس از بروز انحرافات اولیه است.
- سیستم کنترل خودکار تولید (AGC) در این سطح برای تنظیم توان ژنراتورها و حفظ تعادل تولید و مصرف استفاده میشود.
-
کنترل ثالثیه (Tertiary Control)
- یک استراتژی کنترلی بلندمدت برای بهینهسازی عملکرد سیستم قدرت و کاهش هزینههای تولید است.
- این سطح شامل مدیریت انرژی و برنامهریزی اقتصادی تولید است.
۳. روشهای مدرن کنترل در سیستمهای قدرت
با پیشرفت فناوری، روشهای کنترلی هوشمند در سیستمهای قدرت گسترش یافتهاند:
- کنترل پیشبین مدل (MPC): با پیشبینی وضعیت آینده شبکه، عملکرد بهینه را تضمین میکند.
- کنترل تطبیقی: پارامترهای کنترلی را بر اساس شرایط شبکه تنظیم میکند. انجام پروژه کنترل تطبیقی با متلب را از متلبی بخواهید.
- کنترل مقاوم: در برابر عدم قطعیتها و تغییرات شدید در شبکه مقاوم است.
- کنترل مبتنی بر یادگیری ماشین: با تحلیل دادههای گذشته، بهبود پایداری و بهرهوری را فراهم میکند.
۴. کنترل در شبکههای هوشمند
شبکههای هوشمند برق (Smart Grid) از تکنولوژیهایی مانند اینترنت اشیا (IoT) و سیستمهای کنترل پیشرفته بهره میبرند. برخی از کاربردهای کنترل در این شبکهها شامل موارد زیر است:
- مدیریت سمت تقاضا (DSM): کنترل مصرف برق برای بهینهسازی شبکه.
- کنترل تولید پراکنده (DG): تنظیم توان خروجی منابع انرژی تجدیدپذیر.
- کنترل ریزشبکهها (Microgrids): مدیریت شبکههای محلی کوچک با قابلیت کارکرد مستقل.
اگر نیاز به انجام پروژه کنترل سیستم های قدرت دارید میتوانید با کمک متلب و سایتهای تخصصی مثل متلبی این کار را انجام دهید.
بخش پنجم: شناسایی سیستم
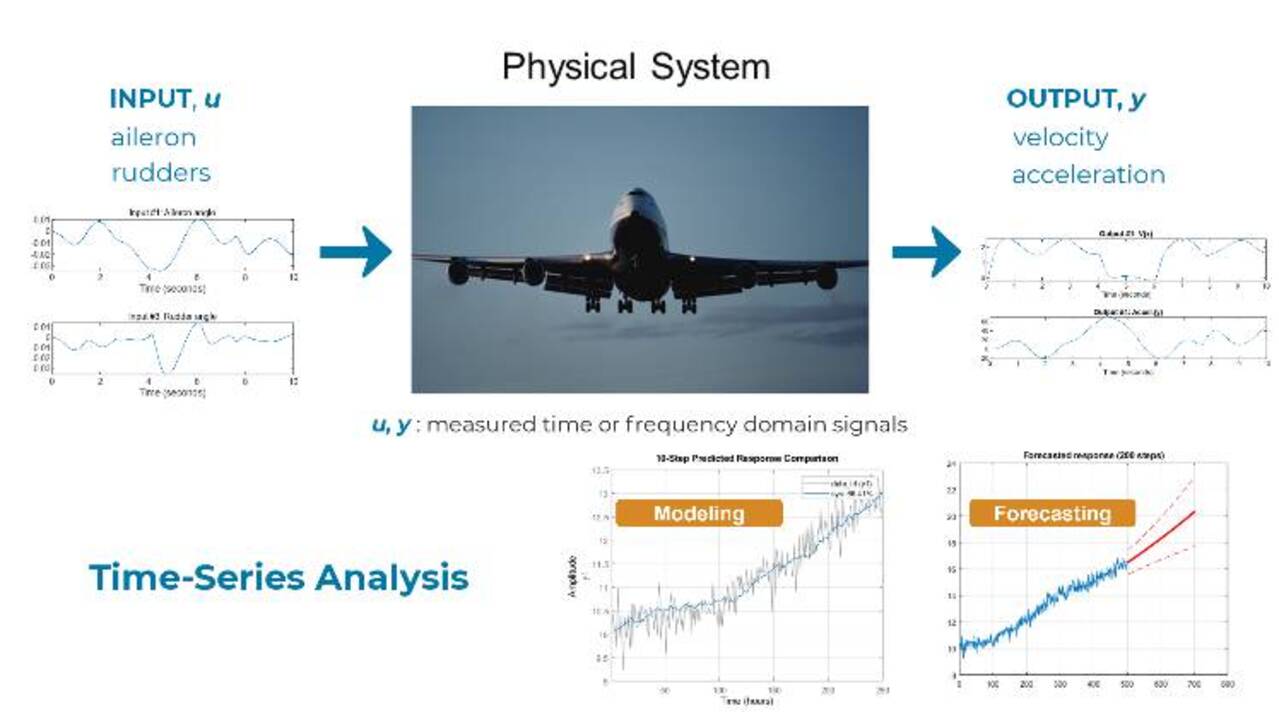
شناسایی سیستم (System Identification) در مهندسی کنترل برای مدلسازی سیستمهای دینامیکی بر اساس دادههای تجربی و مشاهدهشده از ورودی و خروجی است.
تعریف شناسایی سیستم
شناسایی سیستم فرآیندی است که طی آن یک مدل ریاضی از رفتار دینامیکی یک سیستم بر اساس دادههای ورودی و خروجی تجربی استخراج میشود. این فرآیند شامل جمعآوری داده، انتخاب ساختار مدل، تخمین پارامترها و ارزیابی مدل است.
مراحل کلی شناسایی سیستم
فرآیند شناسایی سیستم معمولاً شامل مراحل زیر است:
-
جمعآوری دادههای تجربی:
دادههای ورودی و خروجی سیستم در شرایط مختلف اندازهگیری و ثبت میشوند. این دادهها میتوانند ناشی از سیگنالهای آزمایشی خاص یا عملیات عادی سیستم باشند. -
انتخاب ساختار مدل:
تعیین نوع مدل ریاضی که قرار است رفتار سیستم را توصیف کند. مدلها میتوانند به صورت مدلهای خطی یا غیرخطی باشند. -
تخمین پارامترهای مدل:
تعیین مقادیر بهینه پارامترهای مدل به گونهای که بیشترین تطابق را با دادههای تجربی داشته باشد. -
اعتبارسنجی مدل:
بررسی دقت و عملکرد مدل با استفاده از مجموعهای از دادههای جدید که در مرحله تخمین استفاده نشدهاند. -
انتخاب مدل بهینه:
اگر چندین مدل وجود داشته باشد، مدلی که بهترین عملکرد را در شبیهسازی و پیشبینی سیستم دارد، انتخاب میشود.
انواع مدلهای مورد استفاده در شناسایی سیستم
مدلهای مورد استفاده در شناسایی سیستم را میتوان به دو دسته کلی تقسیم کرد:
-
مدلهای مبتنی بر معادلات فیزیکی:
این مدلها از قوانین فیزیکی، مانند معادلات نیوتن، قوانین مدارهای الکتریکی و معادلات ترمودینامیکی استخراج میشوند. به عنوان مثال، مدل یک موتور الکتریکی را میتوان با استفاده از معادلات دینامیکی آن بیان کرد. -
مدلهای دادهمحور:
این مدلها فقط بر اساس دادههای ورودی و خروجی سیستم استخراج میشوند و معمولاً برای سیستمهایی که مدل فیزیکی آنها ناشناخته یا بسیار پیچیده است، مورد استفاده قرار میگیرند. انواع متداول این مدلها عبارتند از:- مدلهای خطی: شامل مدلهای ARX، ARMAX، OE، و BJ
- مدلهای غیرخطی: شامل مدلهای شبکه عصبی، سیستمهای فازی و...
روشهای شناسایی سیستم
در شناسایی سیستم از روشهای متعددی استفاده میشود که برخی از مهمترین آنها عبارتند از:
-
روشهای حوزه زمان:
این روشها رفتار سیستم را بر اساس پاسخ زمانی آن به ورودیهای خاص تحلیل میکنند. -
روشهای حوزه فرکانس:
در این روشها، پاسخ سیستم در حوزه فرکانس بررسی میشود و مدلها بر اساس تابع تبدیل یا طیف فرکانسی استخراج میشوند. -
روشهای مبتنی بر بهینهسازی:
در این روشها، با استفاده از الگوریتمهای بهینهسازی عددی، پارامترهای مدل به گونهای تعیین میشوند که کمترین اختلاف را با دادههای واقعی داشته باشند. -
روشهای شبکههای عصبی و یادگیری ماشین:
این روشها از تکنیکهای هوش مصنوعی برای استخراج مدلهای غیرخطی و پیچیده از دادههای تجربی استفاده میکنند.
کاربردهای شناسایی سیستم
شناسایی سیستم کاربردهای گستردهای در مهندسی و علوم مختلف دارد. برخی از کاربردهای آن عبارتند از:
- کنترل فرایندهای صنعتی: برای تنظیم و بهینهسازی عملکرد سیستمهای صنعتی مانند نیروگاهها، پالایشگاهها و خطوط تولید
- مهندسی پزشکی: برای مدلسازی سیستمهای زیستی و کنترل تجهیزات پزشکی مانند دستگاههای دیالیز و ضربانسازهای قلب
- اقتصاد و مالی: برای پیشبینی بازارهای مالی و تحلیل روندهای اقتصادی
- سیستمهای حملونقل: برای مدلسازی و کنترل ترافیک و خودروهای خودران
- مهندسی هوافضا: برای طراحی سیستمهای کنترل پرواز و شبیهسازی حرکت ماهوارهها
چالشها و محدودیتهای شناسایی سیستم
شناسایی سیستم با چالشهای متعددی همراه است که برخی از مهمترین آنها عبارتند از:
- نویز در دادهها: دادههای اندازهگیری شده معمولاً نویز دارند که دقت مدل را کاهش میدهد.
- انتخاب مدل مناسب: انتخاب مدلی با دقت بالا و پیچیدگی کم چالش است.
- دادههای ناکافی: گاهی دادهها برای شناسایی دقیق سیستم کافی نیستند.
- غیرخطی بودن سیستمها: سیستمهای واقعی اغلب غیرخطیاند و مدلسازی آنها پیچیدهتر است.
انجام پروژه شناسایی سیستم با متلب بسیار رایج است و سایت متلبی به صورت تخصصی در این زمینه کار می کند.
بخش ششم: چالشها و روندهای آینده در کنترل
حوزه کنترل با چالشهایی مانند نیاز به مدلسازی پیچیده و افزایش نیاز به پردازشهای سریع مواجه است:
-
نقش فناوریهای نوظهور مانند هوش مصنوعی و یادگیری ماشینی.
-
ترکیب بینرشتهای علوم: برای حل مسائل پیچیدهتر.
-
چشمانداز آینده: پیشرفتهایی که میتوانند دنیای کنترل را متحول کنند.
نقش متلب در تحلیل و طراحی سیستمهای کنترل
نرمافزار متلب (MATLAB) به دلیل دارا بودن ابزارهای پیشرفته در تحلیل، طراحی و شبیهسازی سیستمهای کنترلی، یکی از محبوبترین گزینهها در این حوزه است. برخی از کاربردهای آن عبارتند از:
-
-
تحلیل پایداری و طراحی کنترلرها
- ابزارهای Simulink و Control System Toolbox امکان مدلسازی، تحلیل و طراحی کنترلرها را فراهم میکنند.
- پایداری سیستمها را میتوان با استفاده از معیارهایی مانند مکان هندسی ریشهها، پاسخ فرکانسی و تحلیل فضای حالت بررسی کرد.
-
شبیهسازی کنترل پیشبین (MPC)
- متلب با داشتن MPC Toolbox، امکان پیادهسازی و تنظیم کنترل پیشبین مدل را فراهم میکند.
- طراحی کنترلر MPC برای فرآیندهای صنعتی، خودروها و سیستمهای انرژی امکانپذیر است.
-
یادگیری تقویتی در کنترل هوشمند
- متلب با پشتیبانی از Reinforcement Learning Toolbox، امکان پیادهسازی و آموزش عاملهای RL برای سیستمهای کنترلی را فراهم میکند.
- میتوان کنترل مبتنی بر یادگیری را برای رباتیک، بهینهسازی انرژی و خودروهای خودران به کار برد.
-
کنترل سیستمهای قدرت
- متلب دارای Power System Toolbox برای تحلیل شبکههای قدرت و پایداری سیستمهای الکتریکی است.
- شبیهسازی AGC، کنترل ولتاژ و فرکانس، و تحلیل پخش بار از جمله قابلیتهای آن است.
-
نتیجهگیری
در این مقاله مروری جامع بر مبانی و پیشرفتهای نوین در سیستمهای کنترل داشتیم. از تکنیکهای پیشبین تا یادگیری تقویتی و کاربردهای گسترده در صنعت، این حوزه همچنان بهعنوان یکی از مهمترین زمینههای تحقیقاتی و کاربردی مطرح است. نقش میانرشتهای این حوزه، بهویژه در تعامل با هوش مصنوعی و مهندسی سیستمها، آیندهای روشنتر را برای کنترل پیشبینی میکند. با توجه به اهمیت این مباحث، انجام پروژههای کنترلی در محیطهایی مانند متلب میتواند به درک بهتر و تسلط بر روشهای مختلف کنترلی کمک کند.













نظر شما